

I ricercatori della Northwestern University hanno sviluppato la prima intelligenza artificiale finora in grado di progettare robot in modo intelligente da zero.
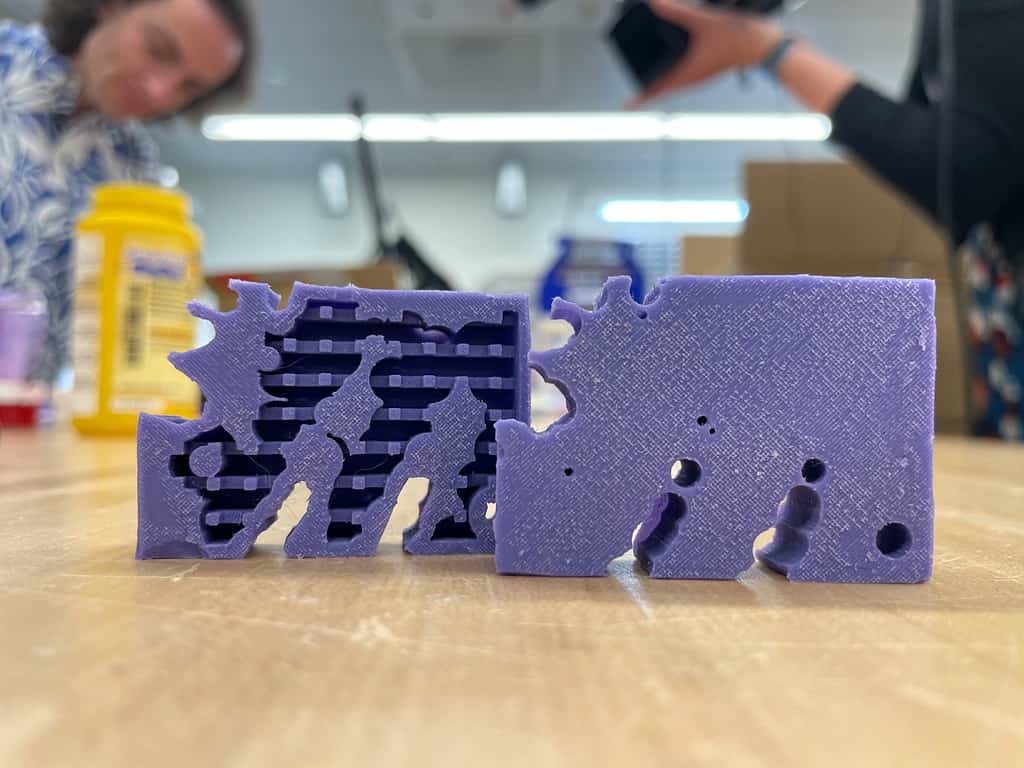
Per testarlo, hanno chiesto all’intelligenza artificiale di “progettare un robot in grado di camminare su una superficie piana”. Pochi secondi dopo, l’intelligenza artificiale ha creato questo blocco viola: un robot che cammina con successo con gambe e pinne posteriori.
Questa intelligenza artificiale è veloce e funziona anche su un personal computer leggero, creando nuove strutture da zero. Ciò è in contrasto con altri sistemi di intelligenza artificiale che di solito necessitano di super computer assetati di energia e di grandi set di dati.
E anche dopo aver esaminato tutti questi dati, questi sistemi potrebbero incorrere a problemi di creatività, imitando solo i lavori del passato.
“Abbiamo scoperto un algoritmo di progettazione molto veloce basato sull’intelligenza artificiale che aggira gli ingorghi dell’evoluzione, senza ricorrere ai pregiudizi dei progettisti umani”, ha affermato Sam Kriegman, uno dei ricercatori, in un comunicato stampa. “Abbiamo detto all’intelligenza artificiale che volevamo un robot in grado di camminare sulla terra. Poi abbiamo semplicemente premuto un pulsante e il gioco è fatto!”
Nel 2020, Kriegman ha sviluppato gli xenobot, i primi robot viventi interamente costituiti da cellule biologiche. Ora vede l’intelligenza artificiale come il prossimo passo avanti nella loro ricerca per esplorare il potenziale della vita artificiale. Il robot in sé è modesto, ma Kriegman ritiene che rappresenti il primo passo in una nuova era di strumenti progettati dall’intelligenza artificiale in grado di agire direttamente sul mondo.
Sebbene il nuovo programma di intelligenza artificiale abbia la capacità di avviarsi da qualsiasi prompt, il punto di partenza di Kriegman e del suo gruppo di ricerca era un compito semplice: progettare una macchina tangibile capace di locomozione terrestre. Dopo aver fissato questo obiettivo, i ricercatori hanno ceduto il controllo, consentendo all’intelligenza artificiale di gestire autonomamente il resto.
Il computer ha iniziato a progettare un blocco delle dimensioni di una saponetta che poteva oscillare ma non camminare. Consapevole di non aver raggiunto il suo obiettivo, l’IA ha rapidamente cambiato il design. Ogni tentativo lo ha aiutato a identificare i difetti e ad aggiornare la struttura. Alla fine, l’intelligenza artificiale ha creato un robot in grado di camminare per metà della sua lunghezza corporea al secondo, ovvero alla metà della velocità del passo umano.
Sorprendentemente, il processo di progettazione del robot, da un blocco informe a un robot ambulante, ha richiesto solo 26 secondi su un laptop. “Ora chiunque può osservare l’evoluzione in azione mentre l’intelligenza artificiale genera corpi robotici sempre migliori in tempo reale”, ha affermato Kriegman in un comunicato stampa. “L’evoluzione dei robot in precedenza richiedeva settimane di tentativi ed errori su un supercomputer”.
I ricercatori hanno utilizzato il robot progettato dall’intelligenza artificiale come modello. Per prima cosa hanno stampato in 3D uno stampo dello spazio negativo attorno al corpo del robot. Quindi hanno riempito lo stampo con gomma siliconica liquida, lasciandola polimerizzare per alcune ore. Una volta tolto dallo stampo, il silicone era sufficientemente flessibile. Era giunto il momento di testare le capacità di camminata del robot.
E il tutto ha funzionato alla meraviglia (come riportato nel video).
