
L’Open Dynamic Robot Initiative Group è una collaborazione tra cinque gruppi di ricerca orientati alla robotica, con sede in tre paesi, con l’obiettivo di costruire una piattaforma robotica Open Source.

Sfruttando la stampa 3D , alcuni PCB personalizzati e parti standard, c’è una bassa barriera all’ingresso in questa nuova tecnologia e un costo molto più ridotto rispetto a robot simili.
Le persone attente noteranno che quasi tutto il controllo di livello superiore è fuori dalla macchina, ospitato all’interno di un PC separato, ma ciò che è interessante è quanto sia effettivamente di basso livello il robot.
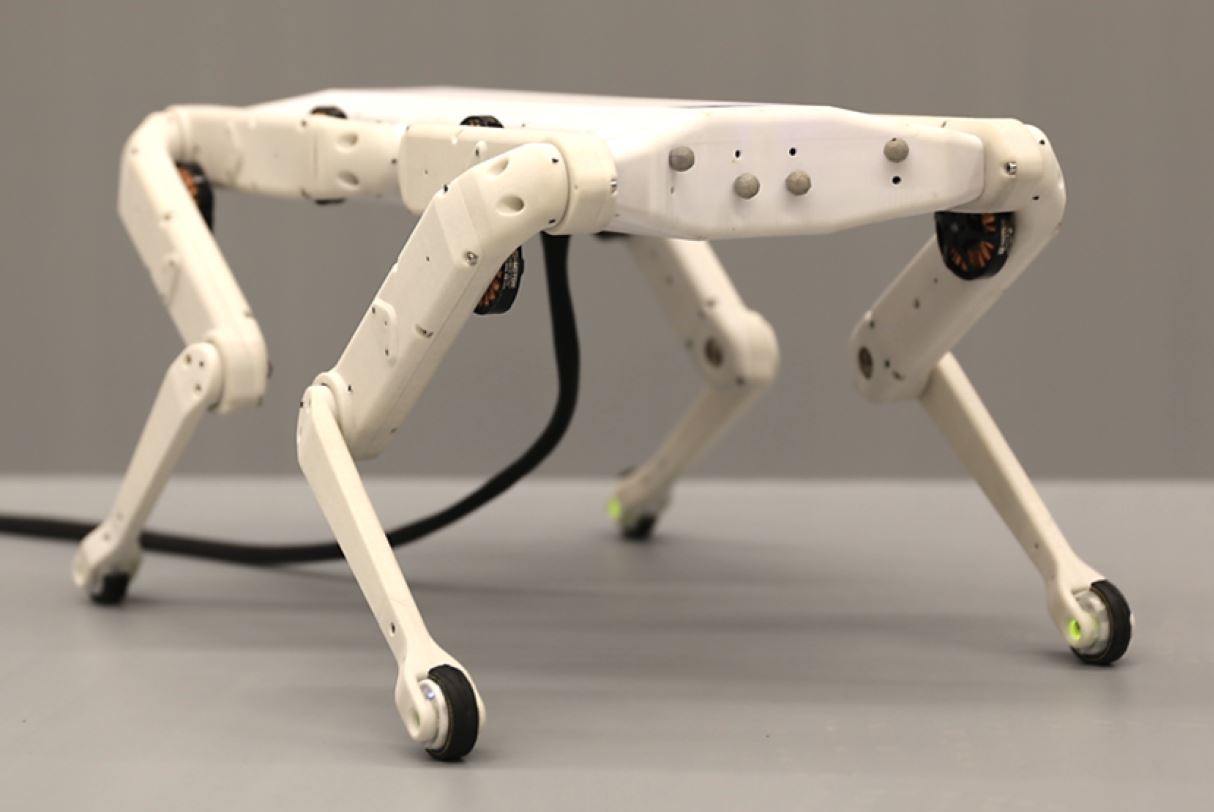
L’hardware di movimento è costituito esclusivamente da alcuni motori BLDC azionati da unità driver di controllo orientato al campo (FOC), un controller wireless e alcune batterie. Il metodo FOC consente una commutazione del motore molto efficiente, offrendo un’efficienza eccellente e una coppia massima.
Un approfondimento sulla matematica di come funziona questo metodo aprirà gli occhi ai non iniziati. Gli encoder ottici collegati ai motori forniscono un feedback di posizione per il circuito di controllo.
È questo ciclo di controllo che è un po’ strano, in quanto funziona tramite Wi-Fi! Normalmente si farebbe tutto il rilevamento della posizione, della coppia e della velocità localmente all’interno dell’unità di uja gamba, con circuiti di controllo locali, oltre a eseguire tutta la cinematica degli arti e la pianificazione del movimento.
Ma ciò richiederebbe un notevole lavoro di elaborazione locale, che può rendere più difficile lo sviluppo.
Questo progetto elude questo, sfruttando prima il protocollo ESPNOW , inizialmente rivolto a ESP8266.
Con l’applicazione di patch di Ubuntu Linux, e permettendo il multitasking preemptive per la programmazione in tempo reale, è stato possibile ottenere pacchetti grezzi fuori dal robot in circa 1 ms, consentendo larghezze di banda in loop di controllo di circa 1 Khz.
E questo era abbastanza veloce da far funzionare almeno sedici motori in parallelo.
Spostando tutto il lavoro di elaborazione su un PC veloce, è possibile diventare molto creativi con la cinematica e sviluppare nuove idee molto più velocemente rispetto all’approccio integrato, senza preoccuparsi di esaurire le risorse della CPU locale.
Potete vedere dai video, che la piattaforma è già notevolmente avanzata, in grado di camminare su superfici irregolari e incoerenti, saltare verticalmente di un metro, nonché riprendersi da spinte, scivolate e altre perturbazioni esterne.
Il progetto YouTube ha molti video per stuzzicarvi l’appetito.
Ci sono molti repository da esplorare sul progetto GitHub, che sarebbe un ottimo inizio per la tua prossima build di robot, quindi se i robot sono la tua passione, questo è sicuramente uno tra i progetti su cui studiare.
Fonte
https://open-dynamic-robot-initiative.github.io/


Betti RHC, la prima graphic novel al mondo dedicata alla cybersecurity awareness, ha finalmente il suo sito ufficiale. Uno spazio tutto suo dove scoprire il progetto, sfogliare le copertine degli episodi e immergersi nel mondo di Betti: la giovane laureanda in informatica che, dopo la morte misteriosa del padre, si trasforma nell'hacker più potente del mondo. Una storia avvincente che, episodio dopo episodio, affronta una minaccia digitale diversa — dal phishing al ransomware, fino al cyberbullismo — e insegna a riconoscerla e a difendersi, senza che sembri mai una lezione.
Sul sito trovate tutto ciò che rende Betti un progetto diverso dal solito: la sua filosofia, le anteprime delle tavole e il racconto di come nasce ogni volume. Perché dietro Betti RHC c'è solo lavoro umano: ogni tavola è disegnata interamente a mano dagli artisti del Gruppo Arte di Red Hot Cyber, senza alcun uso di intelligenza artificiale. E a garantire che ogni storia sia realistica e tecnicamente corretta c'è la supervisione degli hacker etici del gruppo HackerHood, che mantengono il racconto fedele al mondo reale della sicurezza informatica.
C'è spazio anche per le aziende, che possono usare Betti come strumento di awareness diverso dai soliti corsi: acquistare i volumi, personalizzarli con il proprio brand o sponsorizzare nuovi episodi. E come primo regalo, l'episodio "Byte the Silence", dedicato al cyberbullismo, è scaricabile gratuitamente per uso personale.
Perché la miglior difesa, in fondo, è una bella storia. 👉 Scopri tutto su https://betti.redhotcyber.com/