

Caricare una lavastoviglie o cancellare una lavagna mentre ci si sposta sono attività banali per una persona, ma continuano a rappresentare una sfida complessa per i robot umanoidi. Questi compiti richiedono una coordinazione continua tra percezione visiva, controllo delle mani, locomozione ed equilibrio, un livello di integrazione che finora ha confinato molti esperimenti ai laboratori di ricerca.
Un recente studio pubblicato su arXiv “Coordinated Humanoid Manipulation with Choice Policies” da un team dell’Università della California, Berkeley, affronta proprio questo limite, proponendo un nuovo approccio al controllo dell’intero corpo dei robot umanoidi. La ricerca introduce una combinazione tra teleoperazione modulare e selezione intelligente delle azioni, con l’obiettivo di rendere i robot più efficaci in ambienti reali e non strutturati, come abitazioni e uffici.

Nonostante i progressi degli ultimi anni, l’impiego quotidiano dei robot umanoidi è frenato da due problemi principali.
Il primo riguarda la difficoltà di ottenere una coordinazione fluida di tutto il corpo. Attività prolungate, come inserire oggetti in uno spazio ristretto o spostarsi mentre si esegue una manipolazione, richiedono che testa, braccia e gambe lavorino in modo sincronizzato. I sistemi tradizionali di teleoperazione obbligano gli operatori a controllare contemporaneamente un numero elevato di articolazioni, rendendo l’operazione complessa e poco adatta alla raccolta di dati dimostrativi di qualità.
Il secondo problema è il compromesso tra flessibilità e velocità decisionale. Gli esseri umani scelgono rapidamente tra molte varianti della stessa azione, adattandosi al contesto. I robot, invece, tendono a seguire movimenti rigidi che falliscono quando l’ambiente cambia, oppure utilizzano strategie più flessibili ma troppo lente per il funzionamento in tempo reale.
Per superare questi ostacoli, i ricercatori di Berkeley hanno sviluppato un sistema che combina due elementi chiave.
Da un lato, la teleoperazione è stata suddivisa in moduli indipendenti e facili da gestire. Il controllo del robot viene separato in funzioni distinte: orientamento dello sguardo in base all’azione delle mani, gestione della presa, tracciamento del movimento delle braccia e controllo della locomozione. Questa impostazione riduce drasticamente la complessità per l’operatore, permettendo anche a persone non specializzate di fornire dimostrazioni utili in tempi molto brevi.
Dall’altro lato, il processo decisionale del robot si basa su una politica di scelta che genera più azioni possibili in parallelo e seleziona in tempo reale quella più adatta al contesto. In questo modo il sistema mantiene una varietà di comportamenti senza rinunciare alla rapidità di risposta, superando i limiti dei metodi tradizionali basati su azioni predefinite o su calcoli troppo lenti.
Gli esperimenti descritti nello studio sono stati condotti su un robot umanoide bipede a grandezza naturale, dotato di un elevato numero di gradi di libertà distribuiti tra testa, tronco, braccia, mani e gambe. Questa ridondanza meccanica consente al robot di adattare i movimenti a situazioni diverse e di eseguire azioni alternative quando una strategia non risulta efficace.
Le mani robotiche completamente attuate permettono una manipolazione fine e un controllo accurato della forza, mentre le braccia rispondono rapidamente ai comandi di tracciamento. Le gambe supportano movimenti omnidirezionali e mantengono la stabilità grazie a sensori di postura e a sistemi di controllo in grado di regolare l’equilibrio in tempo reale.
Un ruolo centrale è svolto anche dalla percezione visiva. Il sistema utilizza sensori visivi montati sulla testa per mantenere il bersaglio sempre visibile durante l’azione, migliorando in modo significativo l’efficacia della coordinazione occhio-mano, soprattutto nelle fasi più delicate.
Il team di ricerca ha valutato il nuovo approccio in due scenari pratici.
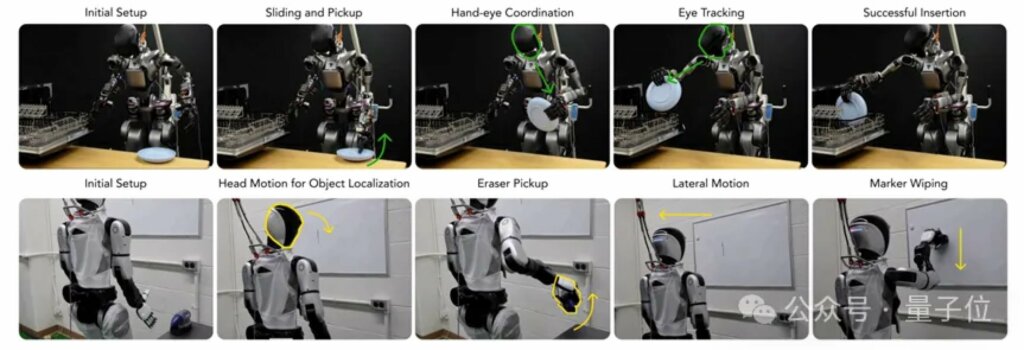
Nel primo, il robot è stato impegnato nel caricamento di una lavastoviglie, un compito che richiede una sequenza continua di azioni: individuare l’oggetto, afferrarlo, trasferirlo e inserirlo correttamente. I risultati mostrano che la coordinazione tra visione e manipolazione è determinante: senza di essa, gli errori aumentano sensibilmente nella fase finale di inserimento.
Nel secondo scenario, più complesso, il robot ha dovuto cancellare una lavagna mentre si spostava. Questo compito mette alla prova la capacità di combinare locomozione ed esercizio di forza in modo stabile. Rispetto ai metodi tradizionali, l’approccio basato sulla selezione intelligente delle azioni ha dimostrato una maggiore continuità operativa e una migliore integrazione tra movimento e manipolazione.
Secondo gli autori, il valore principale dello studio non risiede solo nell’algoritmo, ma nel paradigma complessivo che emerge dalla ricerca. La combinazione di teleoperazione modulare per la raccolta dei dati, politiche decisionali rapide per l’adattamento e hardware ad alto grado di libertà rappresenta un modello replicabile per lo sviluppo futuro dei robot umanoidi.
Questo approccio riduce i costi di addestramento, migliora la robustezza in ambienti non strutturati e avvicina i robot a un utilizzo pratico in contesti reali. Dalle attività domestiche a quelle d’ufficio, i risultati indicano che il passaggio dei robot umanoidi dal laboratorio alla vita quotidiana non è più solo un’ipotesi teorica, ma una prospettiva sempre più concreta.


Betti RHC, la prima graphic novel al mondo dedicata alla cybersecurity awareness, ha finalmente il suo sito ufficiale. Uno spazio tutto suo dove scoprire il progetto, sfogliare le copertine degli episodi e immergersi nel mondo di Betti: la giovane laureanda in informatica che, dopo la morte misteriosa del padre, si trasforma nell'hacker più potente del mondo. Una storia avvincente che, episodio dopo episodio, affronta una minaccia digitale diversa — dal phishing al ransomware, fino al cyberbullismo — e insegna a riconoscerla e a difendersi, senza che sembri mai una lezione.
Sul sito trovate tutto ciò che rende Betti un progetto diverso dal solito: la sua filosofia, le anteprime delle tavole e il racconto di come nasce ogni volume. Perché dietro Betti RHC c'è solo lavoro umano: ogni tavola è disegnata interamente a mano dagli artisti del Gruppo Arte di Red Hot Cyber, senza alcun uso di intelligenza artificiale. E a garantire che ogni storia sia realistica e tecnicamente corretta c'è la supervisione degli hacker etici del gruppo HackerHood, che mantengono il racconto fedele al mondo reale della sicurezza informatica.
C'è spazio anche per le aziende, che possono usare Betti come strumento di awareness diverso dai soliti corsi: acquistare i volumi, personalizzarli con il proprio brand o sponsorizzare nuovi episodi. E come primo regalo, l'episodio "Byte the Silence", dedicato al cyberbullismo, è scaricabile gratuitamente per uso personale.
Perché la miglior difesa, in fondo, è una bella storia. 👉 Scopri tutto su https://betti.redhotcyber.com/