Articoli più letti dei nostri esperti






Attacco zero-day a CISCO Catalyst SD-WAN Manager: come proteggersi ora
Cisco ha segnalato che una vulnerabilità di alta gravità nel Catalyst SD-WAN Manager, risulta attualmente sfruttata in attacchi attivi. La falla, nota come CVE-2026-20245, ha un punteggio CVSS pari a 7.8...

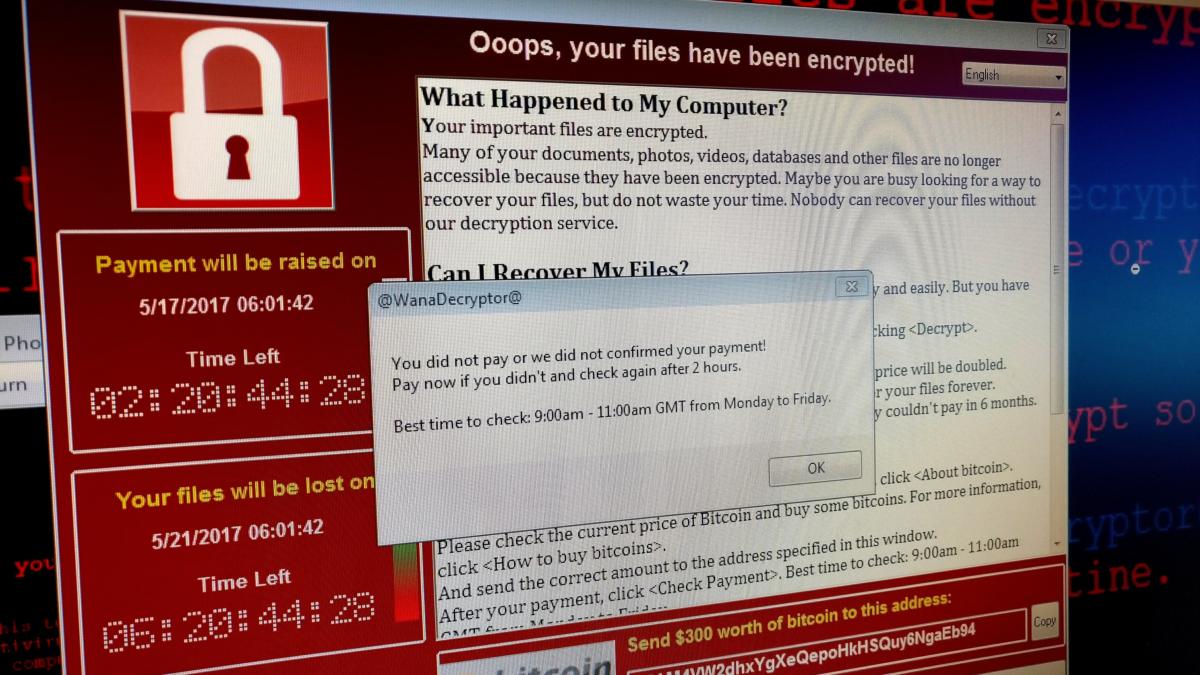
I worm autonomi stanno arrivando! Il Cybercrime 2.0 è oramai è alle porte
È passato tempo da quando Fred Cohen nel lontano 1983 dimostrò in un ambiente di laboratorio, come un programma informatico potesse autoreplicarsi e diffondersi all’interno di un sistema vittima. Introdusse...

Caricabatterie elettrici a rischio: Nuovi bug scoperti dai ricercatori sugli XCharge C6
I ricercatori di sicurezza hanno recentemente scoperto gravi difetti di sicurezza nei caricabatterie nell'infrastruttura dei veicoli elettrici. Nello specifico, queste vulnerabilità XCharge C6 appena scoperte minacciano le reti globali di...

Trump considera il direttore di Palantir Shyam Sankar per guidare il CISA
Secondo due fonti non divulgate, l'amministrazione Trump sta valutando la possibilità di affidare la direzione dell'agenzia federale per la sicurezza informatica civile a un dirigente del settore tecnologico di Palantir.Lo...

62 milioni di utenti di Stripchat a rischio! Cosa potrebbe avvenire dopo la vendita?
La notte del 2 giugno 2026, alle 03:49, l'utente "Euphoric_Reply_5727" ha pubblicato un post nel forum underground BreachForums dove metteva in vendita i dati di Stripchat. Viene dichiarato nel post...

La chiusura del forum underground XSS ha cambiato il mondo del cybercrime
Per due decenni, il forum clandestino XSS è rimasto un punto di riferimento fondamentale per i criminali informatici. Qui si cercavano complici, si vendevano gli accessi e si discuteva su malware, phishing,...

FBI, NSA e CISA avvertono degli attacchi ai serbatoi ATG. Lo spettro di Colonial Pipeline allarma gli USA
Le agenzie federali statunitensi, tra cui l'FBI e la NSA, stanno mettendo in guardia contro un'impennata di attacchi informatici mirati ai sistemi automatici di misurazione del livello del carburante nei...

Terrorismo 4.0: come l’Intelligenza Artificiale sta cambiando la propaganda estremista
L’intelligenza artificiale non sta “rimpiazzando” il terrorismo di vecchia scuola, ma ne sta alterando il metabolismo. Gli elementi a supporto, al momento, non si riferiscono agli scenari fantascientifici, ma alla capacità di...

Un solo notebook può portare al collasso dei server. Trovato un bug che colpisce mezzo internet
Una nuova vulnerabilità, denominata HTTP/2 Bomb, è stata scoperta da ricercatori di Calif che permette di sovraccaricare la memoria dei popolari web server come Apache, Nginx e Microsoft IIS in...
Huawei ringrazia gli Stati Uniti per le sanzioni! Ma gli analisti USA a cosa pensavano nel 2019?
Noi di RHC lo abbiamo sempre sostenuto che il percorso delle sanzioni verso la Cina e la Russia non avrebbero fatto altro che potenziare questi stati piuttosto che gli Stati...
Ultime news
 Cybercrime
Cybercrime
Attacco zero-day a CISCO Catalyst SD-WAN Manager: come proteggersi ora
Cisco ha segnalato che una vulnerabilità di alta gravità nel Catalyst SD-WAN Manager, risulta attualmente sfruttata in attacchi attivi. La falla,...
Carolina Vivianti - 6 Giugno 2026
 Cultura
Cultura
I worm autonomi stanno arrivando! Il Cybercrime 2.0 è oramai è alle porte
È passato tempo da quando Fred Cohen nel lontano 1983 dimostrò in un ambiente di laboratorio, come un programma informatico...
Massimiliano Brolli - 6 Giugno 2026
 Vulnerabilità
Vulnerabilità
Caricabatterie elettrici a rischio: Nuovi bug scoperti dai ricercatori sugli XCharge C6
I ricercatori di sicurezza hanno recentemente scoperto gravi difetti di sicurezza nei caricabatterie nell'infrastruttura dei veicoli elettrici. Nello specifico, queste...
Carolina Vivianti - 6 Giugno 2026
 Cyberpolitica
Cyberpolitica
Trump considera il direttore di Palantir Shyam Sankar per guidare il CISA
Secondo due fonti non divulgate, l'amministrazione Trump sta valutando la possibilità di affidare la direzione dell'agenzia federale per la sicurezza...
Luigi Zullo - 6 Giugno 2026
 Cybercrime
Cybercrime
62 milioni di utenti di Stripchat a rischio! Cosa potrebbe avvenire dopo la vendita?
La notte del 2 giugno 2026, alle 03:49, l'utente "Euphoric_Reply_5727" ha pubblicato un post nel forum underground BreachForums dove metteva...
Chiara Nardini - 5 Giugno 2026
 Cybercrime
Cybercrime
La chiusura del forum underground XSS ha cambiato il mondo del cybercrime
Per due decenni, il forum clandestino XSS è rimasto un punto di riferimento fondamentale per i criminali informatici. Qui si cercavano complici,...
Chiara Nardini - 5 Giugno 2026
 Cybercrime
Cybercrime
FBI, NSA e CISA avvertono degli attacchi ai serbatoi ATG. Lo spettro di Colonial Pipeline allarma gli USA
Le agenzie federali statunitensi, tra cui l'FBI e la NSA, stanno mettendo in guardia contro un'impennata di attacchi informatici mirati...
Carolina Vivianti - 5 Giugno 2026
 Cyberpolitica
Cyberpolitica
Terrorismo 4.0: come l’Intelligenza Artificiale sta cambiando la propaganda estremista
L’intelligenza artificiale non sta “rimpiazzando” il terrorismo di vecchia scuola, ma ne sta alterando il metabolismo. Gli elementi a supporto, al momento,...
Massimo Dionisi - 5 Giugno 2026
 Hacking
Hacking
Un solo notebook può portare al collasso dei server. Trovato un bug che colpisce mezzo internet
Una nuova vulnerabilità, denominata HTTP/2 Bomb, è stata scoperta da ricercatori di Calif che permette di sovraccaricare la memoria dei...
Carolina Vivianti - 5 Giugno 2026
 Cyberpolitica
Cyberpolitica
Huawei ringrazia gli Stati Uniti per le sanzioni! Ma gli analisti USA a cosa pensavano nel 2019?
Noi di RHC lo abbiamo sempre sostenuto che il percorso delle sanzioni verso la Cina e la Russia non avrebbero...
Luigi Zullo - 5 Giugno 2026
 Cybercrime
Cybercrime
Rapid7 Labs scopre buffer overflow pericoloso nel telefono HP Poly VVX 450
Rapid7, ha recentemente condotto una ricerca su un bug zero-day che riguarda il telefono VoIP HP Poly VVX 450, scoprendo...
Luigi Zullo - 4 Giugno 2026
 Innovazione
Innovazione
NVIDIA vuole reinventare il PC ma non ha tempo per le console dei videogiochi
Nvidia, che tempo fa otteneva la maggior parte dei suoi ricavi dal mercato dei videogiochi, ha cercato di trovare applicazioni...
Carolina Vivianti - 4 Giugno 2026
Ricorrenze storiche dal mondo dell'informatica

Massimiliano Brolli - 26/04/2021